Contrôle biomimétique d’une prothèse de bras à partir de mouvements naturels
CNRS Press release // Sorry, it’s in french. see article reference below
Les prothèses robotiques de bras ont beaucoup progressé mais leur contrôle par une personne amputée reste un problème majeur. Dans un article publié dans Journal of NeuroEngineering and Rehabilitation, les scientifiques ont développé un contrôle original basé sur la reconstruction des articulations manquantes chez l’amputé à partir des mouvements résiduels de moignons et d’information contextuelles. Ils démontrent qu’un réseau de neurones artificiels entrainé sur des mouvements naturels permet de reconstruire les articulations manquantes de manière à contrôler quasi normalement un avatar de bras en réalité virtuelle.
Lire la suite sur le site du cnrs

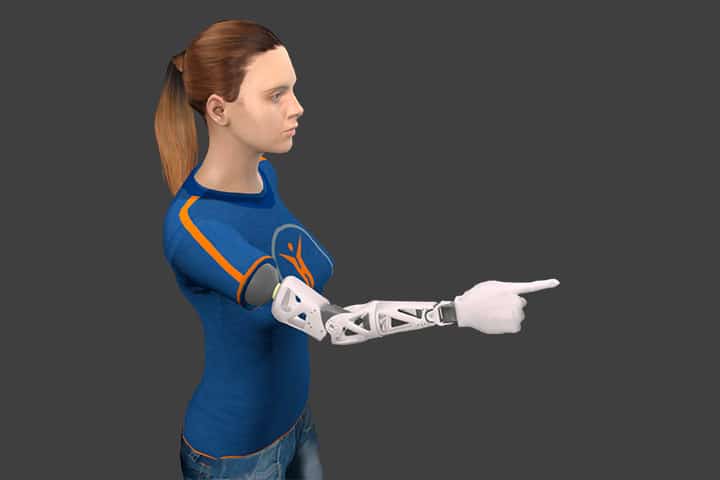
Figure : Gauche : Un sujet en environnement virtuel doit attraper des bouteilles de positions et orientations variées avec un avatar de bras contrôlé par les mouvements de son vrai bras Droite : Un réseau de neurones artificiels est ensuite entrainé sur ces mouvements naturels et utilisé pour reconstruire le mouvement des articulations d’une prothèse contrôlée par une personne amputée (illustration virtuelle).
Reference
Shoulder kinematics plus contextual target information enable control of multiple distal joints of a simulated prosthetic arm and hand.
Mick S., Segas E., Dure L., Halgand C., Benois-Pineau J., Loeb G. E., Cattaert D., & de Rugy A. (2021).
Journal of NeuroEngineering and Rehabilitation, 18(1), 3. https://doi.org/10.1186/s12984-020-00793-0
Contact
Aymar De Rugy
Equipe Contrôle sensorimoteur hybride
+33 5.57.57.15.09
Last update 30/03/21